Unsere Forschung: Befahrbare Freiraumerkennung mit Radarsensoren
von Chetan
Wir bei VAIVA wissen, dass die Entwicklung von ADAS (Advanced Driver Assistance Systems) / AD (Autonomes Fahren)-Funktionen aus Sicherheitssicht eine herausfordernde Aufgabe ist – insbesondere die Interpretation von verschiedenen Situationen. In einer kürzlich veröffentlichten Forschungsarbeit zeigen unsere VAIVA-Kollegen auf, wie die Freiraumerkennung direkt aus einem einzigen Radarscan möglich ist.
Es freut uns sehr endlich mitteilen zu können, dass unsere Forschungsarbeit von der European Radar Conference 2021, die im April 2022 in London stattfand, akzeptiert und veröffentlicht wurde.
Wir bei VAIVA wissen, dass die Entwicklung von ADAS (Advanced Driver Assistance Systems) / AD (Autonomes Fahren)-Funktionen gerade aus Sicherheitssicht eine herausfordernde Aufgabe ist. Insbesondere die Situationsinterpretation – das Verständnis darüber, was in der Umgebung des Fahrzeugs passiert – ist einer der wichtigsten Aspekte aller ADAS/AD-Funktionen. Heute ist der am weitesten verbreitete Sensor für solche Wahrnehmungsaufgaben die Kamera.
Obwohl eine Kamera in der Lage ist wirklich gut zu funktionieren, ist sie in vielen Szenarien, wie bei widrigen Wetterbedingungen, bei Hintergrundbeleuchtung oder anderswo, auch anfällig für Fehler. Darüber hinaus reicht es aus Sicherheitsgründen nicht aus, sich nur auf einen Sensor zu verlassen. Wir glauben, dass es daher immer einen Bedarf nach einem orthogonalen Sensor gibt. Radargeräte werden am häufigsten in der Automobilindustrie eingesetzt, um eine zusätzliche Sicherheitsschicht zu schaffen. Zusätzlich zum Sicherheitsaspekt können Radarsensoren weitere Informationen liefern, wie z.B. die Erkennung der Doppler-(Geschwindigkeits-)Informationen. Vergleicht man die Bildgebungsfähigkeiten beider Sensortypen, sind kommerzielle Radargeräte heute noch nicht auf Augenhöhe mit Kameras. Daher konzentriert sich derzeit ein großer Teil der Forschung und Entwicklung darauf, die Bildgebungsfähigkeiten von Radaren der nächsten Generation zu erhöhen.
Im Zeitalter der datengetriebenen Entwicklung produzieren KI-Algorithmen (Künstliche Intelligenz), vor allem wenn es um die Wahrnehmung der Umwelt mit Kameras geht, bereits Ergebnisse, die manchmal auf Augenhöhe oder sogar besser als Menschen sind, und werden sicherlich zu De-facto-Algorithmen in ADAS/AD-Funktionen.
Wenn es um Radar geht, insbesondere in Bezug auf Radargeräte der nächsten Generation mit verbesserten Bildqualitäten, wurde aber noch nicht genug Know-how bei der Verwendung von KI-Algorithmen auf diesen Sensoren gesammelt. So wurde dies zu einem Schwerpunkt der Forschung, die unser Team bei VAIVA durchführt: Die Entwicklung von KI-Algorithmen, um die Fahrzeugumgebung mithilfe von Radaren der nächsten Generation wahrzunehmen. Unser Ziel ist es KI-basierte Lösungen für die Objekterkennung, Freiraumerkennung, Absichtserkennung, langfristige Trajektorienvorhersage und andere Funktionen zu entwickeln.
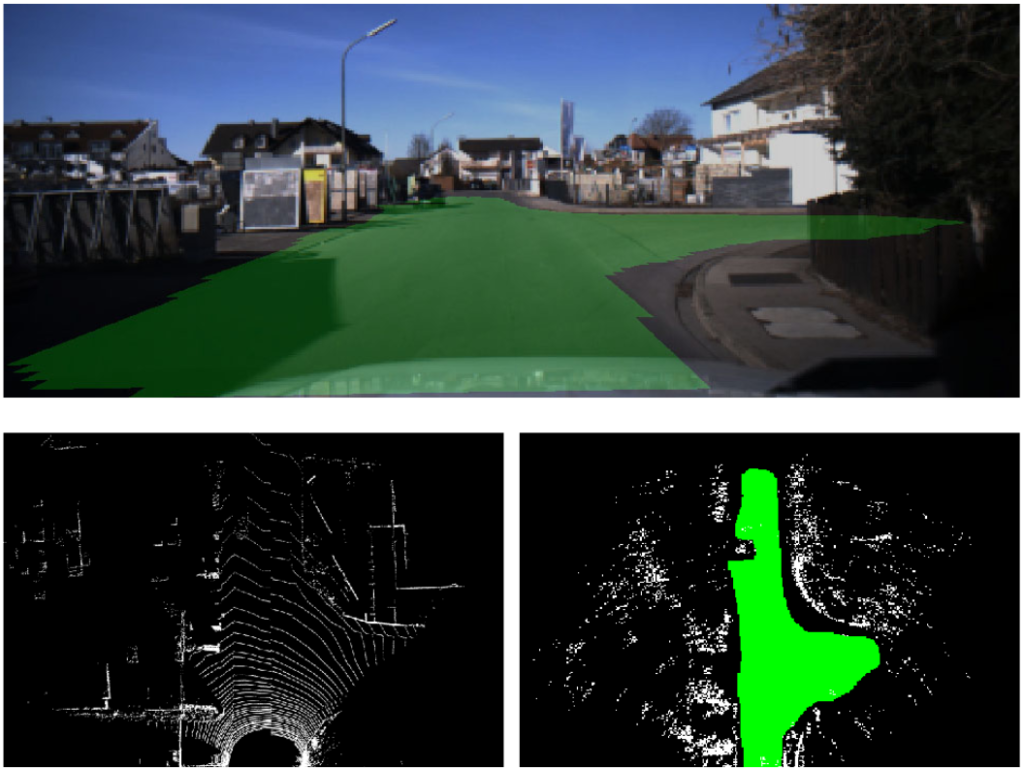
Wir haben dabei festgestellt, dass unsere Arbeit an der Freiraumerkennung eines der interessantesten und herausforderndsten Themen ist. Denn Ziel ist es, einen sogenannten „befahrbaren Raum“ zu erkennen, in dem Kollisionen des Fahrzeugs mit anderen Verkehrsteilnehmern oder anderen Gegenständen vermieden werden können. Abgesehen davon, dass wir nur Radardaten der nächsten Generation verwenden, war es noch schwieriger, da wir nur einen einzigen Radarscan heranziehen wollten, um unsere Erkennung durchzuführen. Einer der entscheidenden Teile dieses Projekts bestand darin, die riesige Datenmenge in ausreichender Qualität zu erhalten, die zum Trainieren der KI-Algorithmen erforderlich ist. Mit unserem eigenen Testfahrzeug konnten wir dafür eine ausreichende Menge an Radardaten erfassen und einen für dieses Projekt nötigen qualitativ hochwertigen Datensatz erstellen. Außerdem konnten wir dank unseres hauseigenen Labeling-Tools den erforderlichen Labeling-Aufwand erheblich reduzieren.
Wir waren alle unglaublich begeistert zu sehen, dass unser ursprünglich erstelltes Konzept am Ende auch Bestand hatte und zu einer gut funktionierenden Lösung führte, die sowohl die Sicherheit, als auch die Effektivität der Wahrnehmungsaufgabe, verbessert. Der vielversprechende und offensichtliche Innovationscharakter unserer Lösung hat uns dazu inspiriert unsere Forschungsarbeiten dazu auch zu veröffentlichen. Das Schreiben einer Publikation war für uns eine völlig neue (und andere) Erfahrung, die wir sehr genossen haben. Vielen Dank an die viele Kolleginnen und Kollegen von VAIVA, die uns nach der Durchsicht unseres Publikationsentwurfs wertvolles Feedback gegeben haben.
Schlussendlich wurde unsere Arbeit von der 18. European Radar Conference (EURAD) in London, Großbritannien, angenommen. Es war eine großartige Erfahrung, persönlich dorthin zu reisen und unsere Arbeit in einem Vortrag zum Thema „AI Methods in Automotive Signal Processing and Information Extraction“ vorzustellen. Darüber hinaus war der Austausch mit so vielen großartigen Menschen aus dem akademischen Bereich und der Industrie, die an der Entwicklung verschiedener KI-basierter Lösungen für Radar arbeiten, so wertvoll – und gibt Input für neue Entwicklungen in unserem Team.
Mehr über unsere Arbeit gibt es auf der IEEE Xplore zu lesen https://ieeexplore.ieee.org/document/9784520