Our research: Drivable free space detection with radar sensors
By Chetan
We at VAIVA know that developing any ADAS (Advanced Driver Assistance Systems) / AD (Autonomous Driving) functions from safety perspective is a challenging task – especially situation interpretation. In a recently published research work VAIVA colleagues show how detection of drivable free space directly from a single radar scan is possible.
It’s a great pleasure for us to share with you that our research work has been accepted and published by European Radar Conference 2021, held in London in April 2022.
We at VAIVA know that developing any ADAS (Advanced Driver Assistance Systems) / AD (Autonomous Driving) functions from safety perspective is a challenging task. Especially situation interpretation – understanding what is happening in the surrounding environment of the vehicle – is one of most important aspects of ADAS/AD functions. Today, the most widely used sensor for perception tasks is camera.
Even though camera is able to perform really well, it is also prone to errors in many scenarios like adverse weather conditions, given backlight or else. Moreover, from a safety perspective it is not sufficient to just rely on one sensor. We believe, there is always a need for an orthogonal sensor in addition. Radars are most widely used in automotive industry to create a additional safety layer. On top of the safety aspect radar sensors can provide additional information like e.g., detecting the doppler (velocity) information. Comparing the imaging capabilities of both sensor types, commercial radars today are not yet in par with cameras. Hence, a great amount of research and development currently is focused on increasing the imaging capabilities of next-generation radars.
In the age of data-driven development, AI (Artificial Intelligence) algorithms are already producing results that are sometimes on par or even better than human beings when it comes to environment perception with cameras and surely will become de-facto algorithms in ADAS/AD functions.
When it comes to radar, especially with regards to next generation radars with improved imaging qualities, not enough know-how has been accumulated in using AI algorithms on these sensors. Thus this became a focus area of the research our team at VAIVA is conducting: Developing AI algorithms to perceive the vehicle’s environment using next generation radar. We aim to develop AI based solutions for object detection, free space detection, intention recognition, long-term trajectory prediction, and other features.
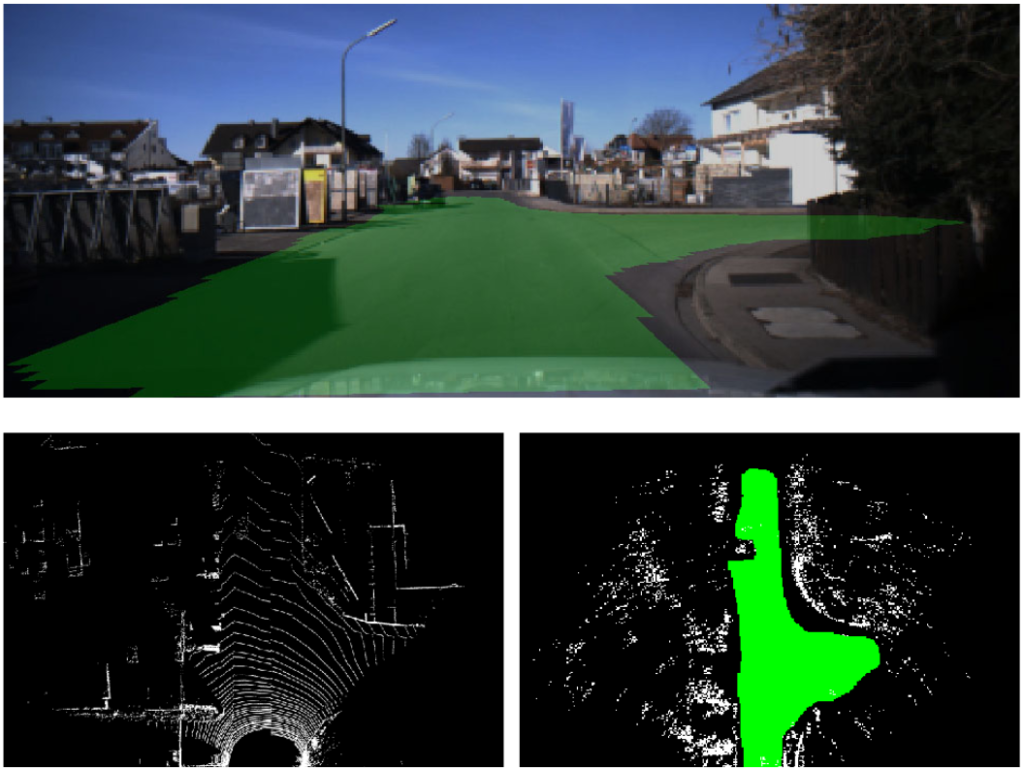
We found our work on free space detection is one of the most interesting and challenging topics here. The objective is to detect so called “drivable space” where any collisions of the vehicle with other road users or any other objects can be avoided. On top of only using next generation radar data what made it even more tricky was the fact, that is our goal to only need one single radar scan to perform our detection. One of the crucial parts of this project has been to obtain the vast amount of data in sufficient quality that’s needed to train the AI algorithms. We have been able to acquire a good amount of radar data using our own test vehicle and to create a high-quality dataset for this project. Thanks to our in-house labeling tool we could greatly reduce the required labeling effort.
We all have been very excited to see that the concept we initially created worked out in the end and led to a good working solution, that improves both safety and effectiveness of the perception task. The promising and the obvious innovation character of our solution inspired us to publish our research work. Writing a publication has been an entirely new (and different) experience to us that we enjoyed a lot. Many thanks go out to many colleagues at VAIVA who provided us with valuable feedback after reviewing our draft publication.
Finally our work was accepted by the 18th European Radar Conference (EURAD) held at London, United Kingdom. It was a great experience to personally go there and present our work in a session dedicated for ’AI Methods in Automotive Signal Processing and Information Extraction’. On top the exchange with so many great people from academic disciplines and the industry who are working on development of different AI based solutions for radar has been so valuable – and input for new developments in our team.
You can read more about our work now on the IEEE Xplore here https://ieeexplore.ieee.org/document/9784520