The fastest route into simulation
When developing concepts for driver assistance functions, the question of effectiveness in real road traffic is very important. Optimally, an assistance system avoids or prevents a large number of accidents without triggering false alarms in non-critical situations. Virtual simulation has become an indispensable analysis tool for evaluating effectiveness. Here, a virtual prototype of the system is put to the test in traffic situations from the real field, among other things. Developers compile a wide variety of scenarios from enormous amounts of real accident and normal driving data.
The starting point in the development process are often individual accidents. In the specific case, we look at how an assistance system would have changed the accident: Is the severity of the accident even avoided altogether? Then one looks at the use in a large number of comparable cases to evaluate how effective the system is overall, or whether there are areas that have not been taken into account so far.
Furthermore, it is important to consider both non-critical situations, in which the system should not react at all, and critical situations. Normal driving data is particularly helpful in this type of design decision. With their help, one gets a feeling for how certain maneuvers take place. For example, at what speed do road users turn? Normal driving data is therefore of great importance, especially for autonomous driving. They can be used to significantly expand the spectrum of the driving situation under consideration.
In order to perform these simulative evaluations efficiently, it must be possible to transfer as many situations as possible into the simulation as accurately as possible with little effort. Until now, however, the transfer into a complete simulation has often been time-consuming, inflexible and prone to inaccuracies.
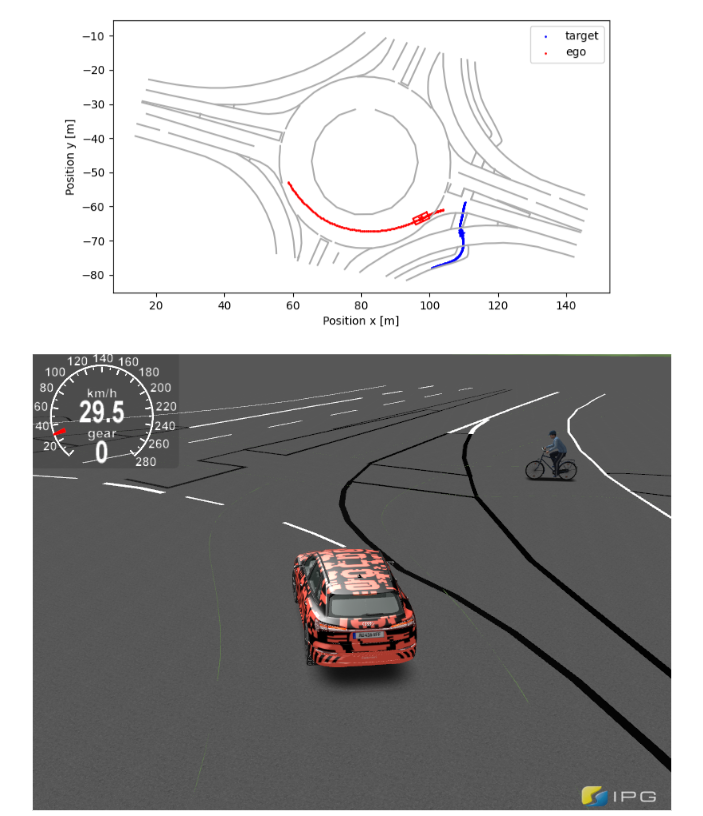
Our experts have dedicated themselves to this problem on behalf of CARIAD SE. The result is a tool that converts the scenarios fully automatically into a simulation in CarMaker from IPG Automotive.
With this tool you now have the possibility to simulate selected scenarios from the accident as well as the normal driving area with only one command. In addition to the information about the parties involved, we have taken into account as much additional information about the traffic situation as possible, e.g. visual obstacles or road markings (detectable by the vehicle). The simulation can always be flexibly adapted to the individual requirements of the user. For example, vehicles, sensors and functions to be tested can be varied.
In just under a year of development, our colleagues have achieved an outstanding result: They have been able to reduce the usual deviations that arise in forward simulations of this kind to a minimum. With the help of a two-stage optimization process, they have made it possible to map points in time of particular interest (e.g. crash constellation in accident data) with very high accuracy in the simulation. And this despite the many different modification and adjustment options. This accuracy is not offered by any other tool and helps to achieve fast, reliable evaluations, safeguards and forecasts during function development.